Auf dem Weg zu einer menschenähnlichen Wahrnehmung für selbstfahrende Autos
Was nehmen selbstfahrende Autos von ihrer Umgebung wahr und wie interpretieren sie die hierzu empfangenen Informationen? Das sind wichtige Themen bei der weiteren Entwicklung von autonomen Fahrzeugen, aber auch von intelligenten mobilen Robotern. Denn diese zentralen Fragen müssen für die autonome Fortbewegung von Maschinen gelöst werden, damit etwa Fahrzeuge auch in belebten Innenstädten sicher durch die Straßen navigieren können. Informatiker haben jetzt einen wichtigen Entwicklungsschritt hin zu einer verbesserten, menschenähnlichen Wahrnehmung komplexer urbaner Umgebung geschafft.
Mit Hilfe Künstlicher Intelligenz (KI) können sich Roboter zwar heute schon selbstständig in ihrer Umgebung zurechtfinden und durch sie navigieren, wenn sie gelernt haben, wie diese Umgebung aussieht. Allerdings ist die Wahrnehmung und korrekte Einschätzung von unbekannten, teilweise verdeckten Dingen und beweglichen Objekten oder Menschen bislang eine große Herausforderung, wie der Roboterforscher Prof. Dr. Abhinav Valada von der Freiburger Albert-Ludwigs-Universität erläutert. Ihm gelang jetzt mit seinem Team vom Robot Learning Lab der Universität Freiburg ein maßgeblicher Schritt zur Lösung dieses Problems.
Die Antwort der Freiburger Wissenschaftler auf die Aufgabestellung, die Umgebungswahrnehmung autonomer Fahrzeuge zu verbessern und so zu mehr Sicherheit beizutragen, lautet amodale panoptische Segmentierung mit Hilfe von KI-Ansätzen. Alles klar?
Nun, bislang können autonome Fahrzeuge ihre Umgebung mittels panoptischer Segmentierung erfassen. Das bedeutet, dass sie bisher nur vorhersagen können, welche Pixel eines Bildes zu welchen „sichtbaren“ Regionen eines Objekts wie einer Person oder eines Autos gehören, wie die Freiburger Forscher erklären. Dagegen sind die Fahrzeuge nicht in der Lage, auch die gesamte Form von Objekten vorherzusagen, insbesondere wenn diese teilweise von anderen Objekten verdeckt werden. Der Mensch wiederum kann sich die vollständige physische Struktur von Objekten vorstellen, selbst wenn diese teilweise verdeckt sind. An dieser Fähigkeit mangelt es den bisherigen Algorithmen, die es Robotern und selbstfahrenden Fahrzeugen ermöglichen, ihre Umgebung wahrzunehmen, noch.
Ganzheitliches Verständnis von Umgebung ermöglichen
Das soll sich durch die Wahrnehmung mit amodaler panoptischer Segmentierung ändern, da diese ein ganzheitliches Verständnis der Umgebung ermöglicht – ähnlich wie beim Menschen. Amodal bedeutet in diesem Fall nach Auskunft der Freiburger Forscher, „dass von einer teilweisen Verdeckung von Objekten abstrahiert werden muss – statt sie als Fragmente zu betrachten, sollten sie in ihrer Ganzheit gesehen werden.“ So werde eine neue Qualität der visuellen Umgebungserfassung möglich, die für die Verkehrssicherheit autonom fahrender Autos einen enormen Fortschritt bedeuten würde, heißt es. Neue KI-Algorithmen für diese Aufgabe könnten Roboter – und autonome Fahrzeuge – in die Lage versetzen, die visuelle Erfahrung nachzuahmen, die Menschen haben, indem sie die vollständige physische Struktur von Objekten wahrnehmen, erklärt Prof. Valada.
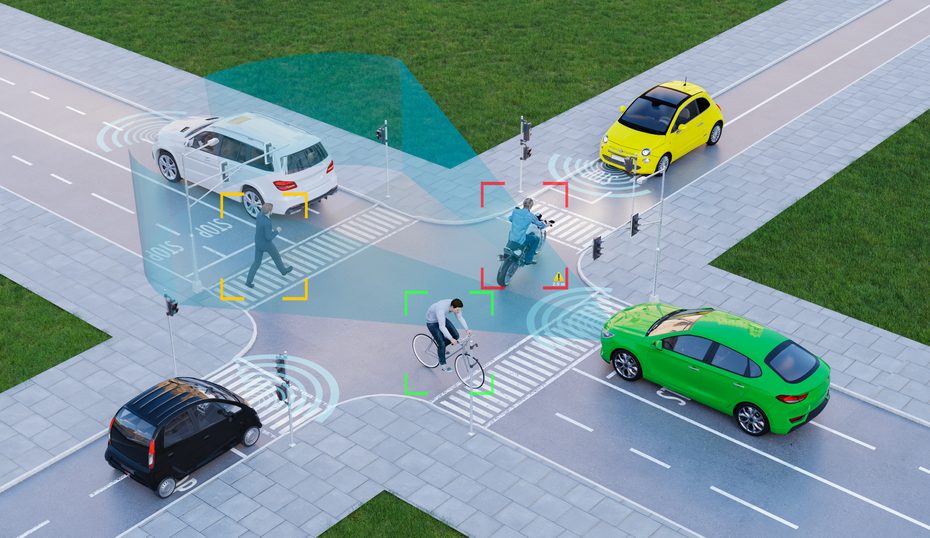
Das wäre eine elementare Voraussetzung für die weitere Entwicklung autonomen Fahrens, da die Sensoren der Autos der Zukunft ihre Umgebung im Straßenverkehr klar erkennen und auch klassifizieren können müssen: Dies ist ein anderes Auto, das ist ein Radfahrer, jenes ist ein Fußgänger etc.. Dafür kommen verschiedene Sensoren zum Einsatz, da man sich aus Sicherheitsgründen nicht auf einen Sensortypen verlassen kann. Zudem ist es unterschiedlichen Sensoren möglich, etwaige Defizite der anderen Messfühler zu kompensieren. So kommen viele Daten zusammen, die mit Hilfe Künstlicher Intelligenz ausgewertet werden. Auf diese Weise werden die Fahrzeuge darauf trainiert, andere Verkehrsteilnehmer und Umgebungsobjekte immer besser zu identifizieren.
Künstliche Intelligenz werde den Verkehr voraussichtlich sicherer machen, ist sich Prof. Alfred Höß, Leiter des Forschungsprojekts KI-ASIC (KI-Prozessorarchitekturen für Radarmodule im autonomen Fahrzeug) an der Ostbayerischen Technischen Hochschule (OTH) Amberg-Weiden, sicher. Er verweist dazu gegenüber dem Bayerischen Rundfunk auf die Ethik-Kommission, die sich schon mit dem Thema beschäftigte. Der Tenor war, so Prof. Höß: Mit Systemen, die zuverlässig funktionieren, werden mehr Unfälle vermieden, als man auf der anderen Seite durch fehlerhaftes Verhalten der Systeme produziert.
KI für verbesserte Reaktion auf Fahrdaten
Das Projekt KI-ASIC dient der Erforschung einer neuartigen Prozessorarchitektur, sogenannten neuromorphen Prozessoren, die es erlauben sollen, KI-Methoden speziell für Mustererkennung und -analyse beim autonomen Fahren einzusetzen. Mit diesen Prozessoren könne eine deutlich verbesserte Verarbeitung der Radardaten bereits im Sensor erfolgen, erläutert das Bundesforschungsministerium. Durch KI-ASIC soll demnach die neuromorphe Elektronik aus der akademischen Grundlagenforschung in die automobile Anwendung überführt werden, um Lösungen für die zentralen Herausforderungen des autonomen Fahrens zu bieten. An dem Vorhaben sind neben der OTH Amberg-Weiden die Infineon Technologies Dresden als Verbundkoordinator, BMW, die Technische Universität München und die Technische Universität Dresden beteiligt.
Die Verbindung von Methoden der Künstlichen Intelligenz (KI) mit innovativen Elektronikkomponenten schafft so die technologische Grundlage dafür, dass autonome Fahrzeuge angemessen auf alle Fahrsituationen reagieren können.
Weitere Informationen:
- https://kommunikation.uni-freiburg.de/pm/2022/auf-dem-weg-zu-einer-menschenaehnlichen-wahrnehmung-fuer-selbstfahrende-autos
- https://www.br.de/nachrichten/bayern/neue-uni-nuernberg-selbstfahrende-autos-und-intelligente-roboter,Suz0vfZ
- https://www.br.de/nachrichten/bayern/so-trainieren-forscher-systeme-fuer-selbstfahrende-autos,TECwkUG
Möchten Sie unsere Recherche-Tipps kostenlos und regelmäßig in ihr Postfach? Hier können Sie sich in unseren Verteiler eintragen!
Foto: shutterstock.com